Advanced Options
Source file: epoch-setups-resources-advanced-options.htm

The following parameters can be defined for Haulage based schedules:
Maximum Allowable Acceleration/Deceleration
Unloaded Deceleration (km/h/s): This setting limits the deceleration of an empty truck to the specified number. This will override retard curve when necessary.
Loaded Deceleration (km/h/s): This setting limits the deceleration of a loaded truck to the specified number. This will override retard curve when necessary.
Acceleration (km/h/s): This setting limits the acceleration of a truck. This will override the rimpull curve when necessary.
Traction
Coefficient of Traction: Factor describing the friction between truck tyres and ground in the direction of the motion.
Lateral Coefficient of Traction: Factor describing the friction between the truck tyres and the ground in the direction perpendicular to the motion.
Braking Reliance on Traction (%): This factor proportionally increases distance required for breaking (represent reliance on traction coefficient to slow truck down).
Interpolated Path
Rolling Resistance (%): This factor specifies the rolling resistance from the current block that is mined to the start of the ramp.
Gradient (%): This factor describes the gradient of the interpolated path.
Retarder Options
Maximum Use of Retarder Force (%): This setting helps to prevent overheating of the retarder on long steep descends. The lower this number the slower the truck will move when retarder is in use.
Use of Retarder: Currently, Evolution defaults to “Always” and changing this setting does not impact calculations.
Path Cost Factors
Time (Cost per Hour): The cost associated with the time taken for a given path per hour. This is combined with the fuel cost to get an overall cost for each path.
Fuel (Cost per L): The cost associated with each litre of fuel taken for a given path. This is combined with the path time cost to get an overall cost for each path.
Miscellaneous
Travel Time Correction Factor: This factor can be used to account for any additional factors impacting travel time. A factor larger than 1 will increase travel time and vice versa.
Allowed Interpolation: Indicates the amount of interpolation allowed by the engine in the scenario where a path cannot be found between a source and destination.
In-Stage Path Finding: When determining the most optimal path to a reserve in a stage, Evolution can pathfind either inside the shape of the bench that the block is in or in the shape of the stage/bench. This can occur if two adjacent stages are not mined at the same time and the direct path to a block crosses through an empty stage. If you wish to account for any empty stages and create paths which navigate around them, select the In-Stage Path Finding option. Alternatively, you can leave the option unselected and Evolution will use the most direct paths on-bench, regardless of whether they cross into empty stages.
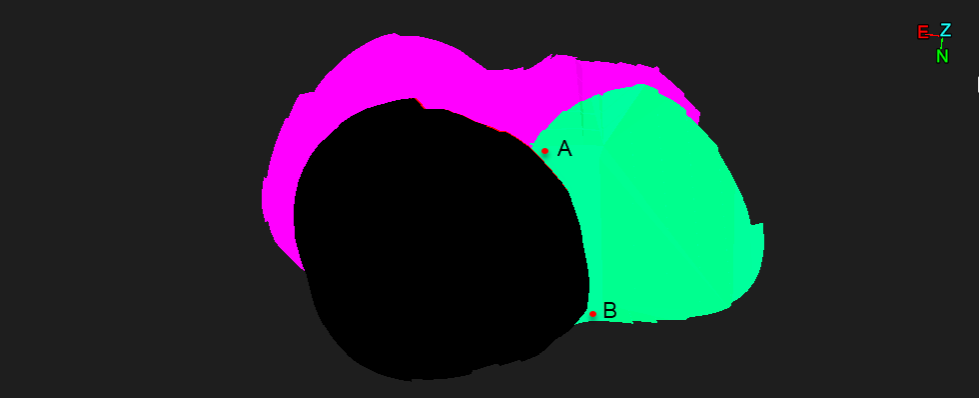
A pit contains three stages (10, 20 and 30) where stage 10 is mined first, stage 20 is mined second and stage 30 is mined last. The following image displays a top-down view of this pit.

After stage 10 is mined, the stage area is empty. To create an in-stage path from point A to point B in stage 20, Evolution can navigate around or through the empty stage.
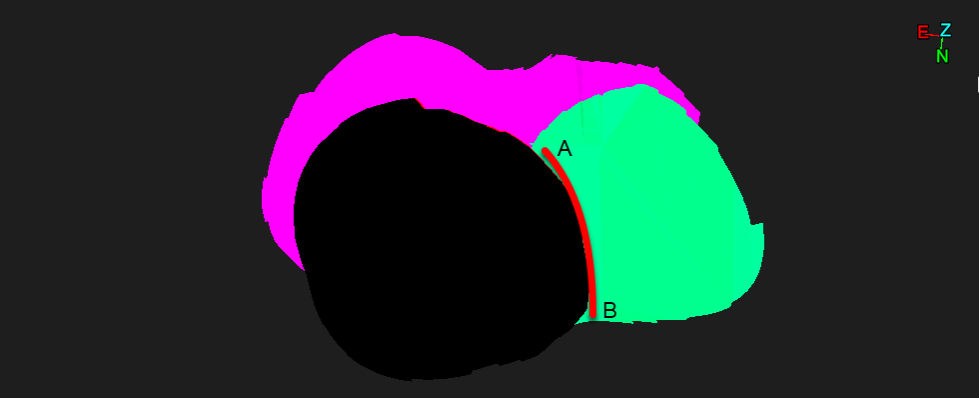
If you do not select In-Stage Path Finding, Evolution will ignore the empty stage and create a path directly from point A to point B.

If you select In-Stage Path Finding, Evolution will consider the empty stage and create a curved path around it, from point A to point B.
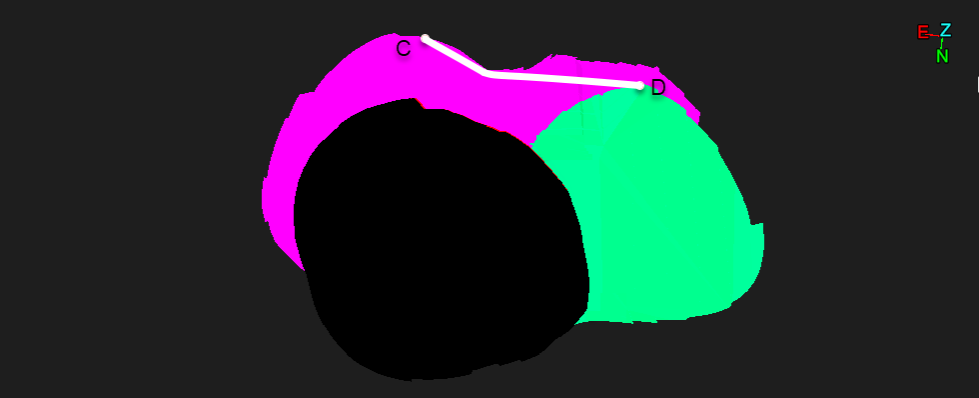
The following image displays regular pathfinding from point C to point D, in the Evolution.
 s
s
Ramp Distance Tolerance: The minimum distance to provide a truck access from a haulage network edge to a given solid.
