Point Sets
A point set is an arbitrary collection of points or 3D coordinates with no connections between them. A point set is represented in the SDK with the PointSet class. Arbitrary attributes can be applied to point primitives for analysis, filtering, or colouring purposes using the SDK. Many concepts discussed here also apply to other objects with point primitives such as Polyline, Polygon, EdgeNetwork, and Surface.
Point set examples
This section provides a series of practical examples demonstrating how to create, modify, and manipulate point sets using the SDK.
Some examples on this page use non-standard external libraries. You may need to install these separately. External libraries include the following:
To install a library, use the following command: python.exe -m pip install library_name
Note: To run the example scripts provided on this page, first download and extract Maptek_PythonSDK_Sample_IO_Files_20200108.zip to a folder on your system. The example scripts reference the folder location F:\Python SDK Help\data\. You will need to update this location in the scripts to match the folder where you extracted the files.
Creating a point set
This example demonstrates creating a simple point set. Points are defined by assigning an array of coordinates to the points attribute.
from mapteksdk.project import Project
from mapteksdk.data import PointSet
project = Project() # Connect to default project
with project.new("scrapbook/my_points", PointSet, overwrite=True) as points:
points.points = [[0, 1, 0], [0.5, 1, 0.5], [1, 1, 0],
[0, 0.5, 0.5], [0.5, 0.5, 1], [1, 0.5, 0.5],
[0, 0, 0], [0.5, 0, 0.5], [1, 0, 0]]

Modifying an existing point set
This example demonstrates how to modify an existing point set such as the one created in the script above. This approach adjusts the point colours based on their height. While iterating over each point for colour adjustments makes the process straightforward and easy to understand, it may face performance challenges with large point clouds.
from mapteksdk.project import Project
project = Project() # Connect to default project
point_path = "scrapbook/my_points"
with project.edit(point_path) as points:
# Change colour of each point based on heights 0 = Red, 0.5 = Green, 1 = Blue
# This is not the most efficient way, but easiest to understand
for i in range(points.point_count):
point = points.points[i] # [x, y, z] -> x = 0, y = 1, z = 2
if point[2] < 0.5:
# Z is less than 0.5, colour the point Red
points.point_colours[i] = [255, 0, 0, 255]
elif point[2] > 0.5:
# Z is more than 0.5, colour the point Blue
points.point_colours[i] = [0, 0, 255, 255]
else:
# Z is 0.5, colour the point Green
points.point_colours[i] = [0, 255, 0, 255]
Colouring a point set with a single colour
This example demonstrates how to colour all points in a point set with a single colour. It assigns a uniform colour to all points in the set using the point_colours attribute. In this example, the colour red ([255, 0, 0]) is applied.
from mapteksdk.project import Project
project = Project() # Connect to default project
point_path = "scrapbook/my_points"
with project.edit(point_path) as points:
# Could the PointSet a single colour
# With colour and boolean arrays in the SDK, you can use
# a single value to assign to all (e.g. array = [255, 255, 255, (Alpha=255)] or array = [False] )
points.point_colours = [255, 0, 0]
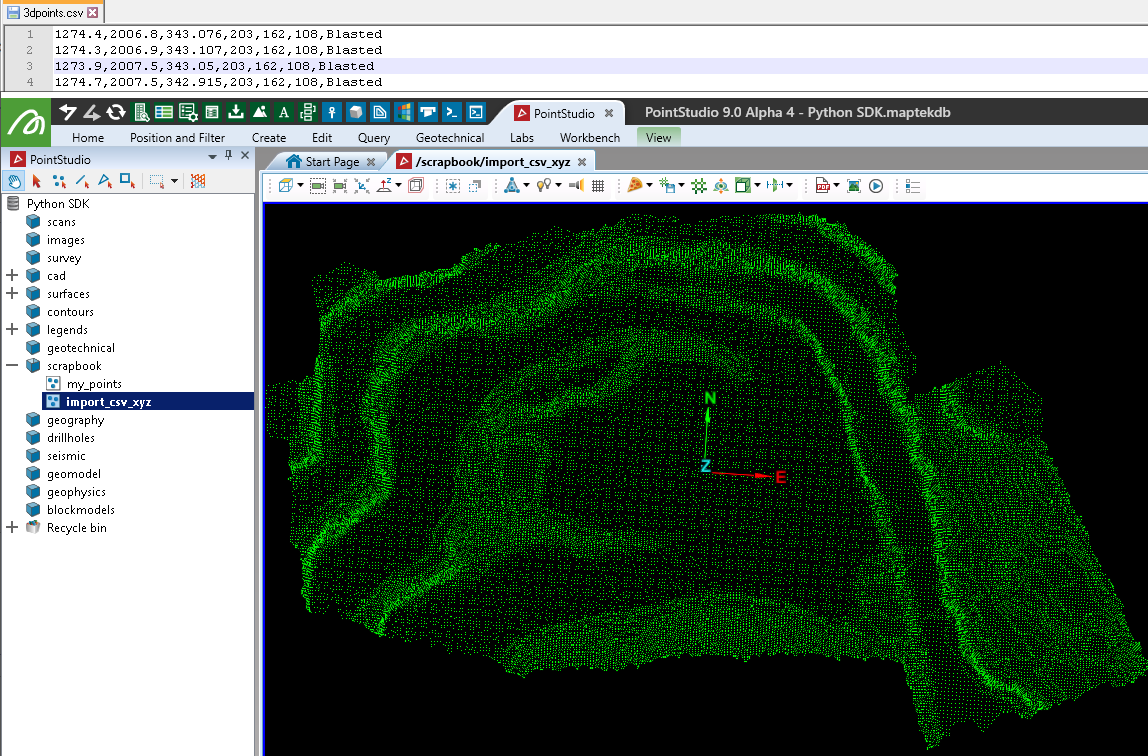
Creating a point set from a CSV file
This example demonstrates how to create a PointSet from a CSV file. The CSV file contains columns x, y, z, r, g, b, and attribute. Only x, y, z are imported in this example.
Note: The file 3dpoints.csv referenced in the script is included in the sample data linked at the top of this page.
from mapteksdk.project import Project
from mapteksdk.data import PointSet
from numpy import genfromtxt
project = Project() # Connect to default project
# Path to where you've saved the sample data:
csv_path = "F:/Python SDK Help/data/3dpoints.csv"
point_path = "scrapbook/import_csv_xyz"
with project.new(point_path, PointSet, overwrite=True) as points:
# Use numpy.getfromtxt to read the csv
csv_data = genfromtxt(csv_path, delimiter=',')
# Extract columns x,y,z=0,1,2 (0:3) from csv_data and assign to points:
points.points = csv_data[0:, 0:3]
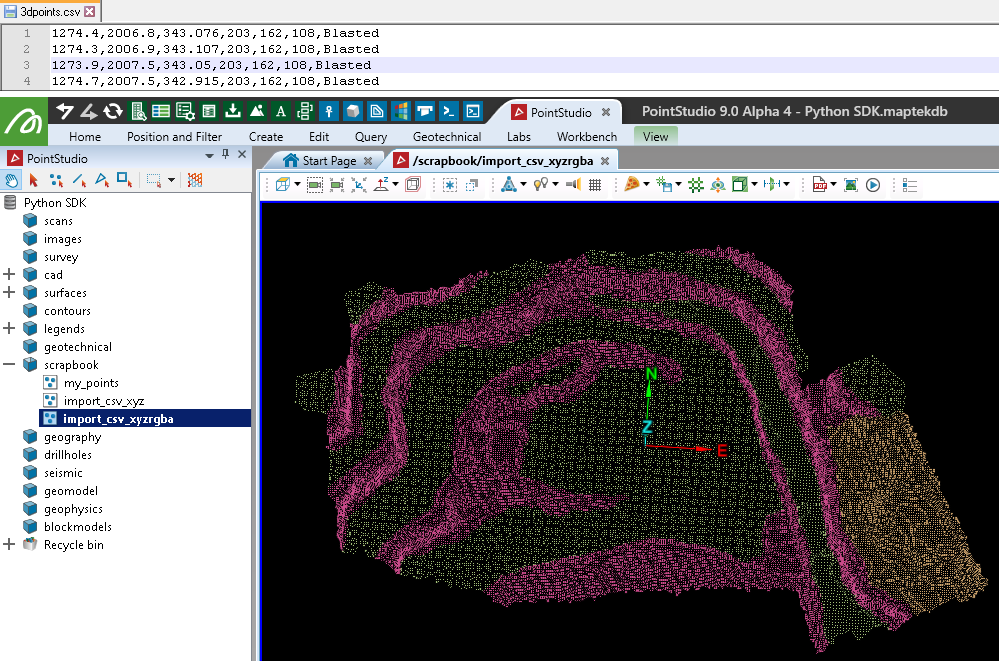
Creating a point set from a CSV file with points and colours
This example extends the previous one by also importing the RGB colour values from the same CSV file. The script creates a PointSet where both the point coordinates (x, y, z) and their corresponding colours (r, g, b) are extracted and assigned.
from mapteksdk.project import Project
from mapteksdk.data import PointSet
from numpy import genfromtxt
project = Project() # Connect to default project
# Path to where you've saved the sample data:
csv_path = "F:/Python SDK Help/data/3dpoints.csv"
point_path = "scrapbook/import_csv_xyzrgba"
with project.new(point_path, PointSet, overwrite=True) as points:
# Use numpy.getfromtxt to read the csv
csv_data = genfromtxt(csv_path, delimiter=',')
# Extract columns x,y,z=0,1,2 (0:3) from csv_data and assign to points:
points.points = csv_data[0:, 0:3]
# Extract columns r,g,b=3,4,5 (3:6) from csv_data and assign to point_colours:
points.point_colours = csv_data[0:, 3:6]
# Note: Colour arrays support input of both [[R,G,B],] or [[R,G,B,A],]
Creating a point set from a CSV file with points, colours, and attributes
This example extends the previous one by importing an additional column from the CSV file containing string attributes for each point. It uses pandas to read the CSV file, allowing for the inclusion of non-numeric data. The script not only assigns point coordinates and colours but also saves and assigns attributes based on the CSV's description column.
Note: The primitive attributes demonstrated here cannot be used with application tools such as Filter > Attributes. However, they can be used for Python work including use with colour maps (legends) and 'custom text' file exports from within the application.
from mapteksdk.project import Project
from mapteksdk.data import PointSet
import pandas as pd
import numpy as np
project = Project() # Connect to default project
# Path to where you've saved the sample data:
csv_path = "F:/Python SDK Help/data/3dpoints.csv"
point_path = "scrapbook/import_csv_xyzrgba_attribute"
with project.new(point_path, PointSet, overwrite=True) as points:
# Use numpy.getfromtxt to read the csv
csv_data = pd.read_csv(csv_path,
delimiter=',',
# No headers have been provided in the csv:
names=["X","Y","Z","R","G","B","Description"])
# Extract columns X, Y, Z from csv_data and assign to points:
points.points = csv_data[['X', 'Y', 'Z']]
# Insert an alpha column and fill it ready for creating R,G,B,A arrays:
csv_data["A"] = 255 # 0 = transparent >> 255 = opaque
# Extract columns R, G, B, A from csv_data and assign to point_colours:
points.point_colours = csv_data[['R', 'G', 'B', 'A']]
############################################################################
# Assign Attributes
############################################################################
# NOTE: The points and point_colours arrays are not committed to the backend
# until exiting the with scope. Attributes are stored directly
# to the backend (needing points/primitives to exist before doing so),
# so we need to either exit the .new() scope and enter a .edit() scope
# before assigning attributes, or run .save() to commit changes.
############################################################################
points.save() # Commit changes above to backend before assigning attributes
############################################################################
# Attribute style: Array of string values with Attribute name 'Description'
# E.g. Attribute 'Description' = 'Blasted' or 'Ground' or 'Wall'
string_array = np.array(csv_data["Description"], dtype=str)
points.save_point_attribute("Description", string_array)
############################################################################
# Attribute style: Array of booleans with Attribute name of the value
# E.g. Attribute 'Blasted' = True/False, 'Ground' = True/False, 'Wall' = True/False
# The csv contains 3 unique values 'Blasted', 'Ground', 'Wall'
unique_values = csv_data["Description"].unique()
for value in unique_values:
# Create a column called 'Blasted', 'Ground', 'Wall' of booleans
# True representing where they existed in the Description column
csv_data[value] = csv_data["Description"] == value
points.save_point_attribute(value, np.array(csv_data[value], dtype=bool))
print("Wrote attributes for: {}".format(points.point_attributes.names))
Colouring a point set by points above height
This example demonstrates how to colour points in a point set based on their height. Assuming the point set scrapbook/import_csv_xyzrgba_attribute exists, the code shows both a slow and a fast method for colouring points above a specified height (329.0 in this case) with a given colour. The slow method iterates through each point, while the faster method uses NumPy for efficient processing.
from mapteksdk.project import Project
import numpy as np
project = Project() # Connect to default project
point_path = "scrapbook/import_csv_xyzrgba_attribute"
colour_above_height = 329.0 # Colour points above Z 239.0
colour_to_use = [200, 200, 200]
with project.edit(point_path) as points:
# Slow version, suitable for small point counts:
for i in range(points.point_count):
if points.points[i][2] > colour_above_height:
points.point_colours[i] = colour_to_use
# Faster version, suitable for large point counts:
# Get indices of all points with z above height
over_height = np.where(points.points[:, 2] > colour_above_height)
# Colour selected indices
points.point_colours[over_height] = colour_to_use
Editing a point set as a pandas dataframe
This example shows how to edit a point set by representing it as a pandas dataframe. Assuming the point set scrapbook/import_csv_xyz exists, the code recolours all points within a specified height range (320 to 330) to red. The dataframe representation allows for straightforward manipulation and experimentation with point attributes such as X, Y, Z, R, G, B, A, Visible, and Selected.
from mapteksdk.project import Project
project = Project() # Connect to default project
point_path = "scrapbook/import_csv_xyz"
min_height = 320
max_height = 330
with project.edit(point_path) as points:
# Get a pandas dataframe representation of the PointSet
with points.dataframe(save_changes=True) as df:
# Columns provided: X, Y, Z, R, G, B, A, Selected, Visible
# Colour all points Red that are between min_heigh and max_height
indices_to_colour = df.loc[(df['Z'] < max_height) & (df['Z'] > min_height)].index
df['R'][indices_to_colour] = 255
df['G'][indices_to_colour] = 0
df['B'][indices_to_colour] = 0
Snapping a point set to a grid using pandas
This example demonstrates how to snap a point set to a grid using pandas. Assuming the point set scrapbook/import_csv_xyz exists, the script creates a copy and snaps all points to the nearest point on a 3-metre XY grid. The dataframe representation is used to adjust the X and Y coordinates and remove duplicate points that fall on the same grid position.
import numpy as np
from mapteksdk.project import Project
project = Project() # Connect to default project
point_path = "scrapbook/import_csv_xyz"
copy = project.copy_object(point_path, "{}_grid_snap".format(point_path), overwrite=True)
cell_size = 3 # snap to 3m grid
with project.edit(copy) as points:
# Get a pandas dataframe representation of the PointSet
with points.dataframe(save_changes=True) as df:
# Columns provided: X, Y, Z, R, G, B, A, Selected, Visible
df["X"] = np.round(df['X']/cell_size)*cell_size
df["Y"] = np.round(df['Y']/cell_size)*cell_size
# Remove duplicate points snapped to same horizontal position
df.drop_duplicates(subset=('X','Y'), inplace=True)
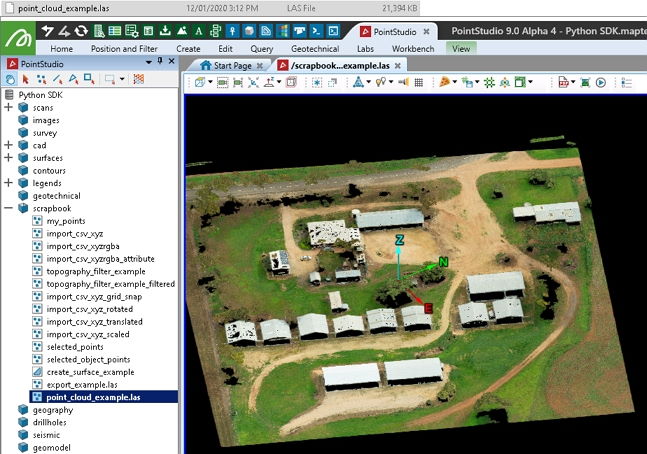
Creating a point set from a LAS file
This example demonstrates how to create a point set from a LAS file that includes colour information.
Note: The file point_cloud_example.las referenced in the script is included in the sample data linked at the top of this page.
Note: The script makes use of the laspy library, which is not included by default with Python. You may need to install it before trying the script.
import os
import numpy as np
import laspy
from mapteksdk.project import Project
from mapteksdk.data import PointSet
project = Project() # Connect to default project
las_file = r"F:\Python SDK Help\data\point_cloud_example.las"
# Import las format:
with laspy.file.File(las_file, mode="r") as lasfile:
# Setup valid arrays for storing in a PointSet
las_points = np.column_stack((lasfile.x, lasfile.y, lasfile.z))
# Read colour data and prepare it for storing:
# If the colours have been stored in 16 bit, we'll need to get the first 8 bits for a proper value
colours_are_16bit = np.max(lasfile.red) > 255
red = np.right_shift(lasfile.red, 8).astype(np.uint8) if colours_are_16bit else lasfile.red
green = np.right_shift(lasfile.green, 8).astype(np.uint8) if colours_are_16bit else lasfile.green
blue = np.right_shift(lasfile.blue, 8).astype(np.uint8) if colours_are_16bit else lasfile.blue
# Create rgba array
las_colours = np.column_stack((red, green, blue))
# Create PointSet object and populate data
import_as = "scrapbook/{}".format(os.path.basename(las_file))
with project.new(import_as, PointSet, overwrite=True) as points:
points.points, points.point_colours = (las_points, las_colours)
Exporting a point set to a LAS file
This example demonstrates how to export points from one or more objects to a LAS file.
Note: The script makes use of the laspy library, which is not included by default with Python. You may need to install it before trying the script.
import os
import numpy as np
import laspy
from mapteksdk.project import Project
project = Project() # Connect to default project
save_as = os.path.abspath("export_example.las")
# Temporarily store points and colours in these arrays
all_points = np.empty([0,3], dtype=np.float64)
all_colours = np.empty([0,4], dtype=np.uint8)
for item in project.get_selected():
with project.read(item) as obj:
if hasattr(obj, 'points'):
# Append visible points from obj to buffer object
# Use .point_selection to get indices for all True values from the selection array
all_points = np.vstack((all_points, obj.points[obj.point_visibility]))
all_colours = np.vstack((all_colours, obj.point_colours[obj.point_visibility]))
if len(all_points) > 0:
print("Writing {} points to {}".format(len(all_points), save_as))
if os.path.exists(save_as):
os.remove(save_as)
# https://laspy.readthedocs.io/en/latest/tut_background.html
header = laspy.header.Header(point_format=2, format = 1.3)
with laspy.file.File(save_as, mode="w", header=header) as lasfile:
lasfile.header.format = 1.3
lasfile.header.point_format = 2
lasfile.header.scale = [1.0,1.0,1.0]
lasfile.header.offset = [0.0, 0.0, 0.0]
lasfile.header.max = np.max(all_points,axis=0).ravel() # [max x, max y, max z]
lasfile.header.min = np.min(all_points,axis=0).ravel() # [min x, min y, min z]
lasfile.x, lasfile.y, lasfile.z = (all_points[:, 0], all_points[:, 1], all_points[:, 2])
lasfile.red, lasfile.green, lasfile.blue = (all_colours[:, 0], all_colours[:, 1], all_colours[:, 2])
print("Wrote file {}".format(save_as))
else:
print("Selected objects contained no points")
Generating statistics from point selection
This example demonstrates how to generate basic statistics for X, Y, Z, R, G, and B values from a selection of points.
from mapteksdk.project import Project
import numpy as np
import pandas as pd
project = Project() # Connect to default project
save_as = "scrapbook/selected_points"
project.delete(save_as)
# Temporarily store points and colours in these arrays
all_points = np.empty([0,3], dtype=np.float64)
all_colours = np.empty([0,4], dtype=np.uint8)
for item in project.get_selected():
with project.read(item) as obj:
if hasattr(obj, 'points'):
# Append points from obj to buffer object
# Use .point_selection to get indices for all True values from the selection array
all_points = np.vstack((all_points, obj.points[obj.point_selection]))
all_colours = np.vstack((all_colours, obj.point_colours[obj.point_selection]))
df = pd.DataFrame(np.column_stack((all_points, all_colours[:, 0:3])),
columns=["X","Y","Z","R","G","B"])
pd.set_option('precision', 0)
print(df.describe())
# Example output:
#>> X Y Z R G B
#>> count 51478 51478 51478 51478 51478 51478
#>> mean 992 1002 993 88 109 45
#>> std 56 49 6 21 21 13
#>> min 894 891 987 9 19 2
#>> 25% 962 973 989 73 93 36
#>> 50% 986 994 990 87 111 44
#>> 75% 1037 1038 995 102 125 53
#>> max 1100 1093 1009 214 208 144
Colouring a point set by height with a colour map
This example demonstrates how to apply a colour map to a point set based on height values.
from mapteksdk.data import NumericColourMap
from mapteksdk.project import Project, PointSet
project = Project() # Connect to default project
# Create simple colour map
with project.new("legends/colourmap_interp", NumericColourMap, overwrite=True) as new_legend:
# Define an arbitrary number of ranges to apply colours between
new_legend.ranges = [300, 330, 360]
# Define equal number of colours to interpolate between
new_legend.colours = [[0, 255, 0], # Blue
[255, 255, 255], # White
[0, 0, 255]] # Green
# Define colours to use for values outside the given ranges
new_legend.lower_cutoff = [128, 128, 128]
new_legend.upper_cutoff = [128, 128, 128]
# Keep the id for reference below
legend = new_legend.id
# Colour selected items by height
for item in project.get_selected():
# Check if the object type is one we'd want to do this with
if item.is_a(PointSet):
with project.edit(item) as obj:
# Take the column of z values from the points array
z = obj.points[:,2]
# Save the values against a new point attribute 'z'
obj.point_attributes.save_attribute("z", z)
# Apply the colour map created above against that attribute
obj.point_attributes.set_colour_map("z", legend)
Filtering a point set by height
This example demonstrates how to filter a point set by height using the point_visibility array. The script sets up visibility conditions to display only points within specified height ranges while hiding others. The visibility array is updated using a boolean mask, allowing for dynamic filtering of points based on their Z values. Points can be recovered later using Filter > Show All in the application or by resetting the visibility array in a script.
from mapteksdk.project import Project, PointSet
project = Project() # Connect to default project
# Colour selected items by height
for item in project.get_selected():
# Check if the object type is one we'd want to do this with
if item.is_a(PointSet):
with project.edit(item) as obj:
# Take the column of z values from the points array
z = obj.points[:,2]
# Apply a numpy mask to the point_visiblity array
# i.e. boolean array based on conditions that can be applied
# directly to the visibility array which is a boolean array
# This will keep points visible between heights 300-320 and 340-360
obj.point_visibility = True # Reset the array
obj.point_visibility[((z > 320) & (z < 325) | (z > 335) & (z < 340))] = False

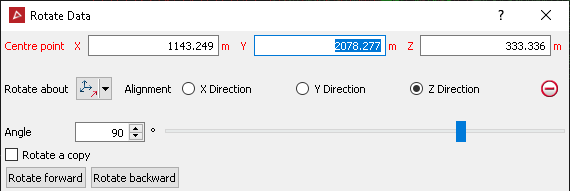
Rotating a point set
This example rotates a point set using its centroid as the origin, rotated on a 2D plane around the z-axis by 90 degrees. The rotation matrix is computed using the scipy.spatial.transform.Rotation module. This example assumes the point set scrapbook/import_csv_xyz exists.
from mapteksdk.project import Project
import numpy as np
from scipy.spatial.transform import Rotation
project = Project() # Connect to default project
point_path = "scrapbook/import_csv_xyz"
copy = project.copy_object(point_path, "{}_rotated".format(point_path), overwrite=True)
rotate_by_degrees = 90
with project.edit(copy) as points:
origin = np.mean(points.points, axis=0)
# Get a rotation matrix, about z axis at 0,0,0 by rotate_by_degrees
rotation = Rotation.from_euler(
'z', # Rotate around z axis
-(rotate_by_degrees), # Rotate counter-clockwise by this amount
degrees=True # Rotation provided in degrees
)
# Shift points to 0,0,0 (-origin), apply rotation, shift points back to origin
points.points = rotation.apply(points.points - origin) + origin
This is equivalent to using the following settings with the rotate tool in the software:
Translating a point set
This example demonstrates how to translate a copy of a point set by applying a translation vector. The script assumes the point set scrapbook/import_csv_xyz exists.
from mapteksdk.project import Project
project = Project() # Connect to default project
point_path = "scrapbook/import_csv_xyz"
copy = project.copy_object(point_path, "{}_translated".format(point_path), overwrite=True)
translate_by = [0, 0, 50] # translate in z by +50
with project.edit(copy) as points:
# Add translation vector to point array
points.points += translate_by
![]()
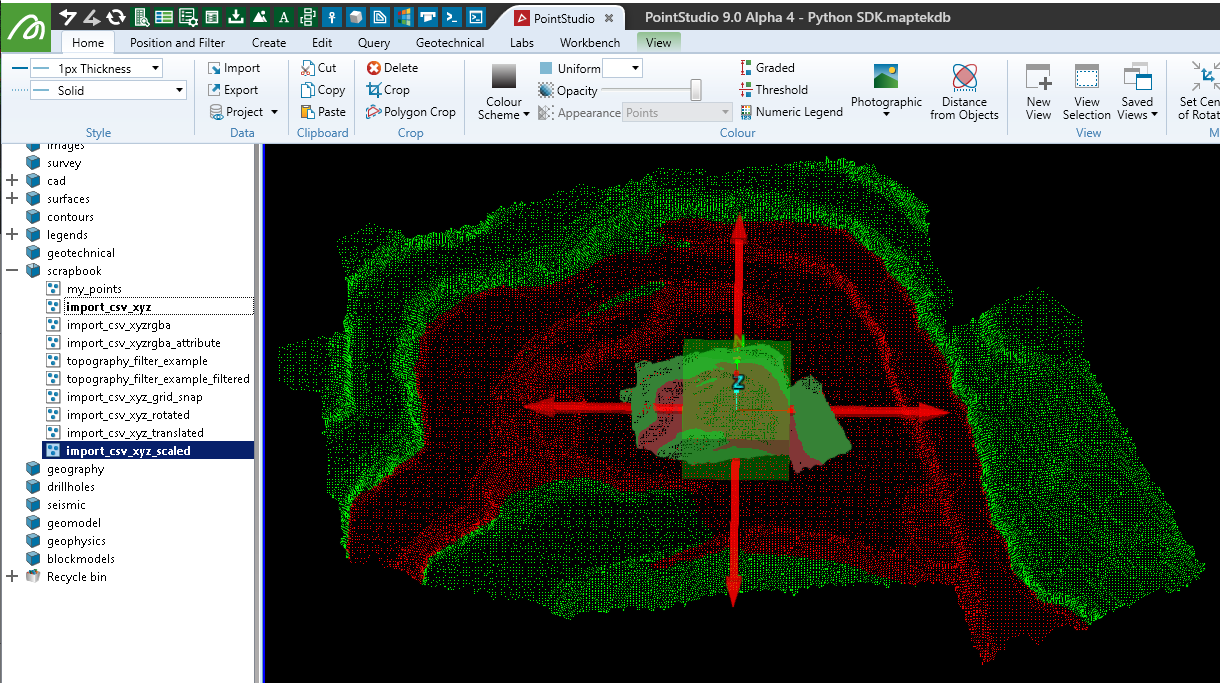
Scaling a point set
This example demonstrates how to scale a point set by applying a scaling factor. The script assumes the point set scrapbook/import_csv_xyz exists.
from mapteksdk.project import Project
import numpy as np
project = Project() # Connect to default project
point_path = "scrapbook/import_csv_xyz"
copy = project.copy_object(point_path, "{}_scaled".format(point_path), overwrite=True)
scale_by = [4, 4, 2] # Scale X by 4x, Y by 4x, Z by 2x
with project.edit(copy) as points:
# Get centroid to use as scale origin
origin = np.mean(points.points, axis=0)
# Shift points to 0,0,0 (-origin), apply scale, shift points back to origin
points.points = np.array(scale_by) * (points.points - origin) + origin
Hiding a point selection
This example demonstrates how to hide selected points within a point set. Assuming a point set is selected with some points marked as selected, the script updates the visibility status to hide only the selected points. The visibility of all other points remains unchanged. The selection status of the points is then cleared.
from mapteksdk.project import Project
from mapteksdk.data import PointSet
import numpy as np
project = Project() # Connect to default project
for item in project.get_selected():
if item.is_a(PointSet):
with project.edit(item) as points:
# Visibility and Selected arrays are of equal length and type
# To hide the selected points we simply apply the opposite
# of the selection array to the visibility array.
# This would also cause any currently hidden points to be shown.
points.point_visibility = np.logical_not(points.point_selection)
# Clear the point selection
points.point_selection = [False]
Hiding a point selection using logical OR
This example demonstrates how to hide selected points in a point set while keeping any already hidden points hidden. The script uses a logical OR operation to combine the visibility status of currently hidden points with the selection status, ensuring that selected points are hidden without affecting the status of already hidden points. The selection status of the points is then cleared.
from mapteksdk.project import Project
from mapteksdk.data import PointSet
import numpy as np
project = Project() # Connect to default project
for item in project.get_selected():
if item.is_a(PointSet):
with project.edit(item) as points:
# Visible = False when Visible == False or Selected == True
# Use np.logical_or() to consider already invisible items + Selected
# Use np.logical_not() to switch True/False on arrays
points.point_visibility = np.logical_not(
np.logical_or(
points.point_selection, # True if selected, or
np.logical_not(points.point_visibility) # True if already hidden
)
)
# Clear the point selection
points.point_selection = [False]
Deleting a point selection
This example demonstrates how to permanently remove selected points from a point set. While visibility masks are generally preferred for data integrity and reversible changes, direct deletion might be necessary when excluding hidden or filtered points from operations. The script uses the PointSet.remove_points() method to delete the selected points, ensuring changes are immediately committed to the backend.
from mapteksdk.project import Project
import numpy as np
project = Project() # Connect to default project
for item in project.get_selected():
with project.edit(item) as points:
# This will be compatible with any object supporting points, including surfaces
if(hasattr(points, 'points')):
# np.where() will return an array of indices from the selection array
points.remove_points(np.where(points.point_selection))
# .remove_points(), .remove_edges(), .remove_facets()
# support single index and arrays of indices.
# Changes are immediately committed to the backend and
# selection, visibility and colour arrays are maintained
Creating a point set from all points in selected objects
This example extracts all points from all supported selected objects that have points. The script iterates through the selected objects, checking if they have point data without needing to open each object individually. If point data is found, it is collected and combined into a new point set.
from mapteksdk.project import Project
from mapteksdk.data import PointSet, Topology
import numpy as np
project = Project() # Connect to default project
save_as = "scrapbook/selected_object_points"
# Temporarily store points and colours in these arrays
all_points = np.empty([0,3], dtype=np.float64)
all_colours = np.empty([0,4], dtype=np.uint8)
for item in project.get_selected():
# Check if the object has point primitives without opening it
if item.is_a(Topology):
with project.read(item) as obj:
# Check if the object has points
if not hasattr(obj, 'points'): continue
# Append points from obj to buffer object
all_points = np.vstack((all_points, obj.points))
all_colours = np.vstack((all_colours, obj.point_colours))
with project.new(save_as, PointSet, overwrite=True) as points:
points.points = all_points
points.point_colours = all_colours
Creating a point set from all selected points
This example demonstrates how to create a new point set by aggregating all selected points from selected objects that have point primitives. The script iterates through the selected objects, checks if they have points, and then combines the selected points and their colours into a new point set. An alternative approach is also provided to aggregate non-selected points instead.
from mapteksdk.project import Project
from mapteksdk.data import PointSet
import numpy as np
project = Project() # Connect to default project
save_as = "scrapbook/selected_points"
# Temporarily store points and colours in these arrays
all_points = np.empty([0,3], dtype=np.float64)
all_colours = np.empty([0,4], dtype=np.uint8)
for item in project.get_selected():
with project.read(item) as obj:
# Check if it is an object with point attributes
if hasattr(obj, 'points'):
# Append points from obj to buffer object
# Use .point_selection to get indices for all True values from the selection array
all_points = np.vstack((all_points, obj.points[obj.point_selection]))
all_colours = np.vstack((all_colours, obj.point_colours[obj.point_selection]))
# Note: to perform the opposite (copy not-selected points) you could use:
# all_points = np.vstack((all_points, obj.points[np.logical_not(obj.point_selection)]))
# all_colours = np.vstack((all_colours, obj.point_colours[np.logical_not(obj.point_selection)]))
with project.new(save_as, PointSet, overwrite=True) as points:
points.points = all_points
points.point_colours = all_colours
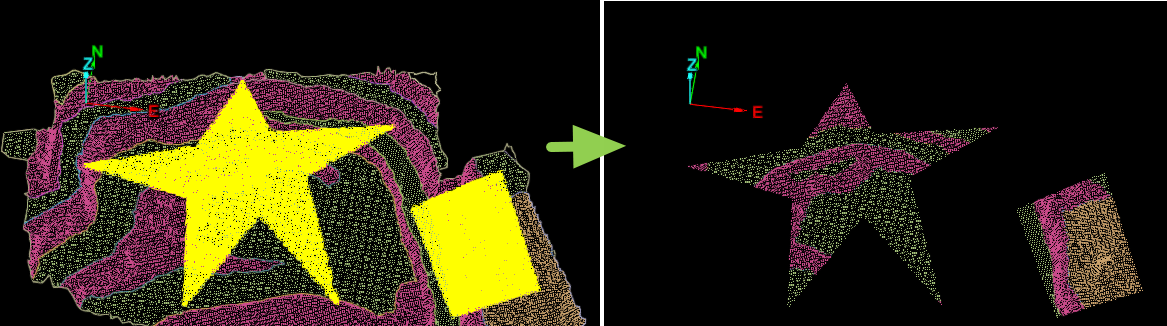
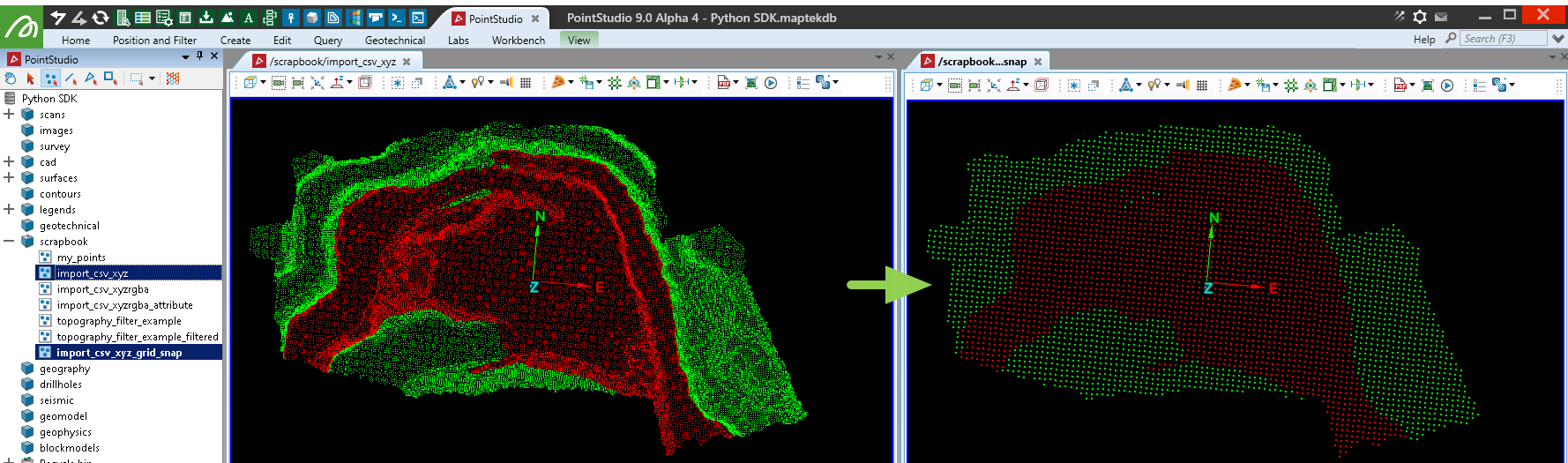
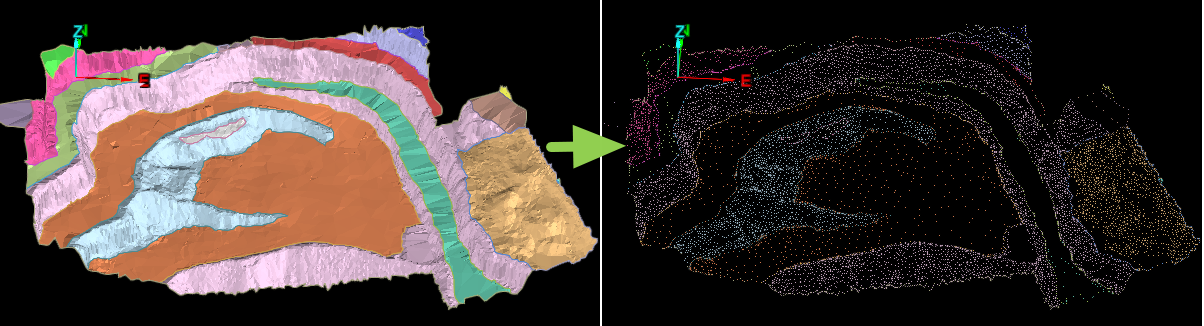
Filtering a point set by topography
This example demonstrates how to apply a topography filter to a point set, similar to the Topography Filter tool in PointStudio. The filter divides the point data into a horizontal grid with a defined cell size, retaining only a specified number of the lowest or highest points within each cell.
Note: The file topography_filter_example.csv referenced in the script is included in the sample data linked at the top of this page.
import numpy as np
import pandas as pd
from mapteksdk.data import PointSet
from mapteksdk.project import Project
from numpy import genfromtxt
def topography_filter(points_object, cell_size=1, lowest=True, count_to_keep=1):
"""Topography filter example
Parameters
----------
points_object (PointSet): PointSet object open for editing
cell_size (float): Size of cell to filter within
lowest (tribool): True = keep lowest, False = keep highest, None = Some of both
count_to_keep (int): Number of points to keep within the cell
"""
# For filtering performance, sort the point data by height
sorted_indices = points_object.points[:, 2].argsort() # sort by z
points_object.points = points_object.points[sorted_indices]
points_object.point_colours = points_object.point_colours[sorted_indices]
points_object.point_visibility = points_object.point_visibility[sorted_indices]
# Create a grid around the data by snapping X and Y values into grid
filter_pts = pd.DataFrame(points_object.points, columns=['X', 'Y', 'Z'])
filter_pts["X_Grid"] = np.round(filter_pts['X']/cell_size)*cell_size
filter_pts["Y_Grid"] = np.round(filter_pts['Y']/cell_size)*cell_size
# Get the highest or lowest (count_to_keep) points within each cell
if lowest is True:
# Get a list of point indices from the filter that match the original
# dataset indices. Use of head/tail assumes that the data is sorted
filtered_indices = filter_pts.groupby(['X_Grid', 'Y_Grid'])['Z'].head(
count_to_keep).index
elif lowest is False:
filtered_indices = filter_pts.groupby(['X_Grid', 'Y_Grid'])['Z'].tail(
count_to_keep).index
else:
# keep some high and some low
filtered_indices_low = filter_pts.groupby(['X_Grid', 'Y_Grid'])['Z'].head(
count_to_keep).index
keep_top = count_to_keep*0.25
filtered_indices_high = filter_pts.groupby(['X_Grid', 'Y_Grid'])['Z'].tail(
keep_top).index
filtered_indices = np.unique(np.concatenate(
(filtered_indices_low, filtered_indices_high), 0))
# Set point visibility array to match the filter mask
points_object.point_visibility = np.isin(filter_pts.index, filtered_indices)
def import_and_copy(project, csv_path, destination, copy_suffix = "_filtered"):
# Extract columns x,y,z=0,1,2 (0:3) from csv_data and assign to points:
csv_data = genfromtxt(csv_path, delimiter=',')
with project.new(destination, PointSet, overwrite=True) as points:
points.points = csv_data[0:, 0:3]
# Once committed, we can get the object path from .id.path
copy_path = "{}{}".format(points.id.path, copy_suffix)
project.delete(copy_path) # delete if already exists
# Copy and return id of the copied version
return project.copy_object(points.id, copy_path)
if __name__ == "__main__":
project = Project() # Connect to default project
import_as = "scrapbook/topography_filter_example"
csv_path = r"F:\Python SDK Help\data\topography_filter_example.csv"
points_to_filter = import_and_copy(project, csv_path, import_as)
# Run the filter
cell_size = 1.5
with project.edit(points_to_filter) as points:
topography_filter(points, cell_size)
The screenshot below shows the imported object on the left, and the copy filtered by the script on the right.

Filtering a point set by colour similarity to selection
This example demonstrates how to filter a point set based on the colour similarity of selected points within a range determined by the mean and standard deviation of the selected points' colours. The script will run repeatedly until the user decides to stop.
from mapteksdk.project import Project
import numpy as np
import math
project = Project() # Connect to default project
end_filter = False
while not end_filter:
# Temporarily store points and colours in these arrays
selected_colours = np.empty([0,3], dtype=np.uint8)
for item in project.get_selected():
# Get colours from selected points
with project.read(item) as obj:
if hasattr(obj, 'points'):
selected_colours = np.vstack((selected_colours, obj.point_colours[obj.point_selection, 0:3]))
# Filter selected objects by those colours
if len(selected_colours) > 0:
# Get colour range by mean +/- std.dev:
sel_reds = selected_colours[:,0]
sel_greens = selected_colours[:,1]
sel_blues = selected_colours[:,2]
st_dev_multiplier = 1.8 # Increases aggression of filter
r_std, g_std, b_std = np.std(sel_reds)*st_dev_multiplier, np.std(sel_greens)*st_dev_multiplier, np.std(sel_blues)*st_dev_multiplier
r_mean, g_mean, b_mean = np.mean(sel_reds), np.mean(sel_greens), np.mean(sel_blues)
r_min, g_min, b_min = math.floor(r_mean - r_std), math.floor(g_mean - g_std), math.floor(b_mean - b_std)
r_max, g_max, b_max = math.ceil(r_mean + r_std), math.ceil(g_mean + g_std), math.ceil(b_mean + b_std)
print("Filtering points with:\n\tRed {} to {}\n\tGreen {} to {}\n\tBlue {} to {}".format(
r_min, r_max, g_min, g_max, b_min, b_max
))
for item in project.get_selected():
with project.edit(item) as points:
if hasattr(points, 'points'):
# Faster method:
red, green, blue = (points.point_colours[:,0], points.point_colours[:,1], points.point_colours[:,2])
filtered_points = np.where((
(red > r_min) & (red < r_max)
& (green > g_min) & (green < g_max)
& (blue > b_min) & (blue < b_max)
))
points.point_visibility[filtered_points] = False
points.point_selection[:] = False # Clear selection
else:
print("No suitable objects/selection found for filtering. Try selecting some points to filter by.")
if input("\n-----------\n\nRun filter again? y/n\n\n").lower() == "n":
end_filter = True
