Kinematic Analysis
Kinematic analyses are conducted using stereonets on a collection of poles (normals of planes) or plane intersections selected from the discontinuities of a rock face. The analyses help to identify the kinematic feasibility for sliding, wedge and toppling failures in an excavated face. The components examined include slope dip, slope dip direction, daylight envelope, slip limit, lateral limits, polar friction cone, and planar friction cone.
The following table and diagrams provide background information explaining the types of failures, critical zones and examples of relevant stereonet diagrams.
Note: You will need to ascertain likely friction angles and lateral limits appropriate to the rock faces and materials being investigated.
|
|
|
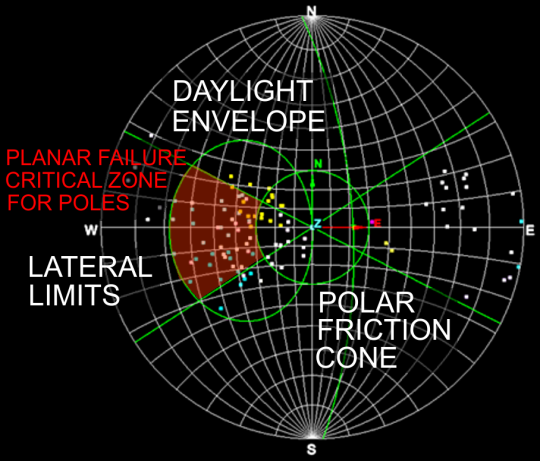
A typical kinematic analysis plot on a stereonet. |
Kinematic analysis components
The kinematic analysis components required for the analysis of each of the failure mechanisms is summarised in the table below.
| Kinematic analysis components | Typical representation on stereonets | Failure mechanisms |
|---|---|---|
|
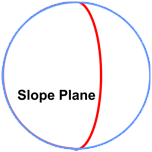
Slope dip angle Slope of the pit wall or main rock face. Measured down from horizontal. Slope dip direction Direction the slope runs directly downwards. Measured from North. |
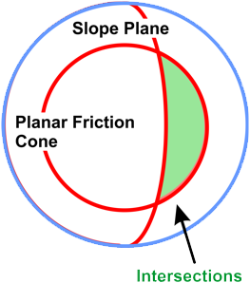
Great circle plotted from the slope dip angle and slope dip direction of the pit wall or main rock face. |
Planar |
|
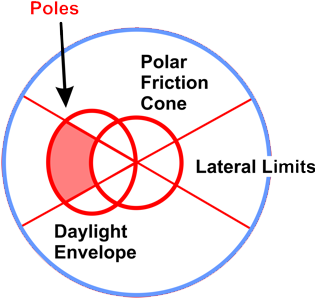
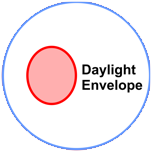
Daylight envelope Determined from slope dip and slope dip direction. The envelope contains the set of poles (normals) of planes at a shallower angle than the slope plane and which could possibly slide off if unconstrained. |
|
Planar |
|
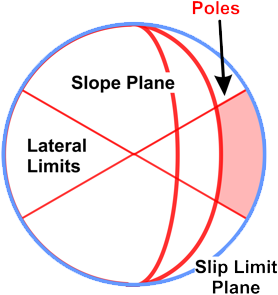
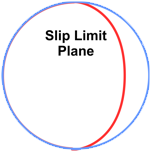
Slip limit Great circle representation of the plane at which friction slipping will occur. Poles (normals) closer to the outside perimeter of the main circle are steeper, so will slide or topple. Note
Slip limit dip angle = pit slope angle - friction angle Slip limit dip direction = pit slope |
|
Flexural |
|
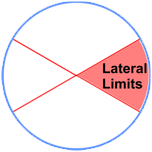
Lateral limits Identifies planes in the same general direction as the main slope face dip direction. Planes outside these limits generally do not initiate a sliding or toppling failure. |
|
Planar |
|
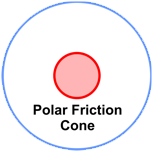
Polar friction cone Planes with poles outside the polar friction cone are steep enough to overcome friction and start sliding. That is, failure may occur when defect plane dip > friction angle (assuming friction only). |
|
Planar |
|
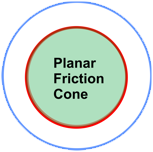
Planar friction cone Plane intersections that occur within the Planar Friction Cone are steep enough to overcome friction and start sliding. That is failure may occur when line of intersection dip (between two discontinuities) > friction angle (assuming friction only). |
|
Wedge |
|
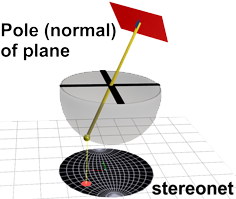
Pole (normal) Point formed by the vector which is perpendicular to the plane of interest (discontinuity). |
|
Planar |
|
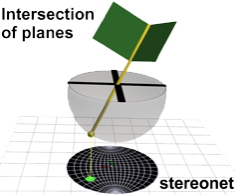
Intersection Point formed by the vector at the intersection of planes of interest (discontinuities). |
|
Wedge |
Failure analysis
The following table displays the critical stereonet regions and point types (poles or intersections) relevant to the analysis for the various failure mechanisms.
| Type of failure | Critical region on stereonet | |
|---|---|---|
|
Note: Orientation and scale can differ, depending on actual planes under investigation. |
||
|
PLANAR FAILURE
Dislodgement and downward-sliding of blocks or layers along a common failure plane. |
Any critical poles occur outside the polar friction cone, inside the daylight envelope and between the lateral limits |
|
|
WEDGE FAILURE
Dislodgement and downward-sliding of blocks along two intersecting, common failure planes. |
|
|
|
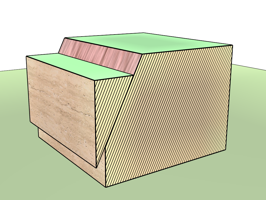
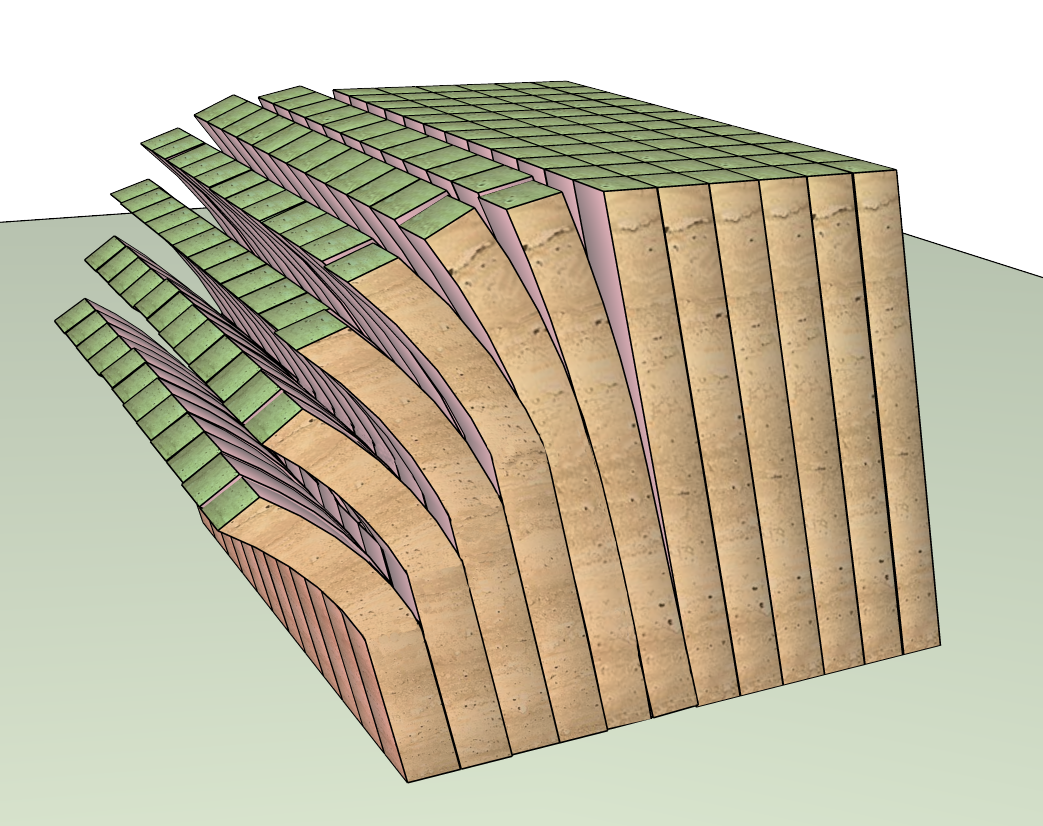
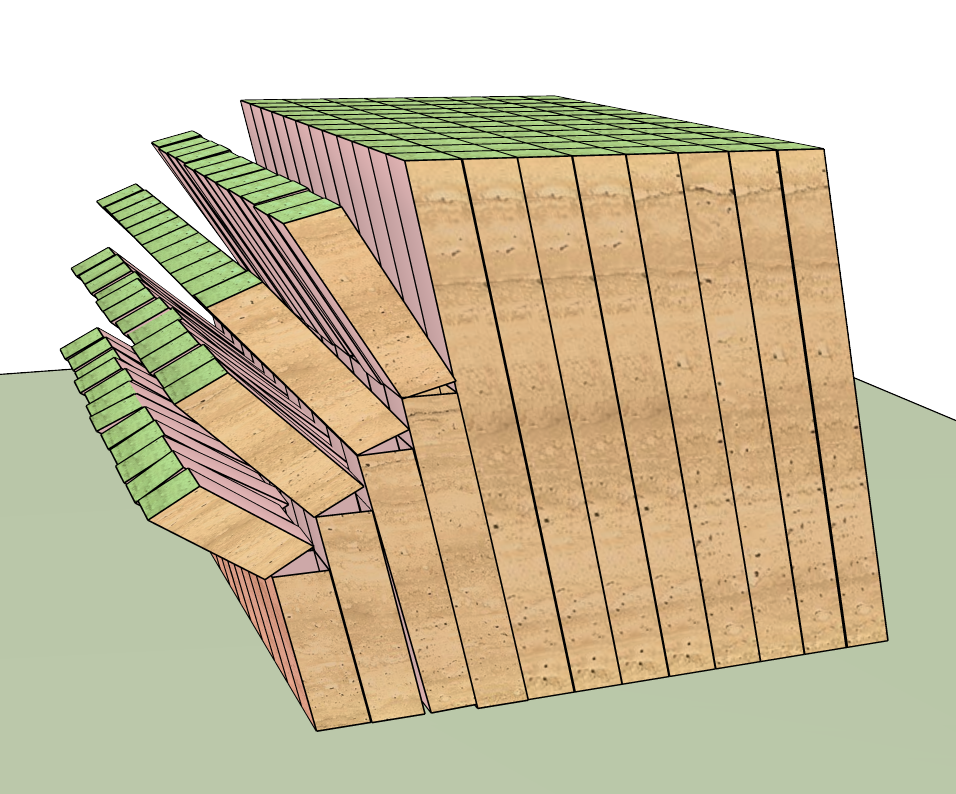
FLEXURAL TOPPLING
Forwards flexing and downward-sliding of steeply slanting blocks or layers. |
Any critical poles occur towards the outside of (steeper than) the slip limit plane, and between the lateral limits. |
|
|
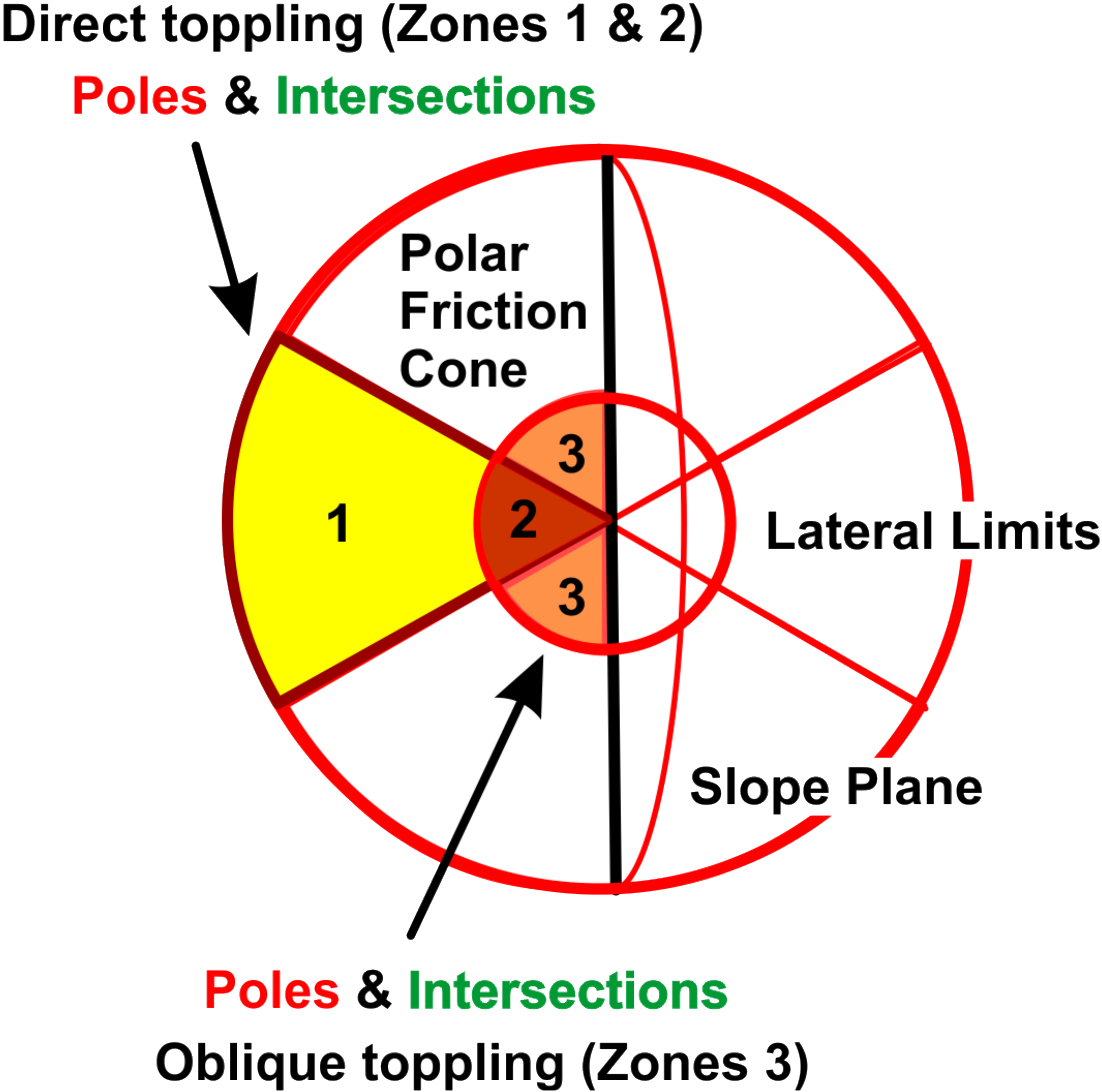
DIRECT TOPPLING
Breaking and toppling forward of steeply slanting blocks or layers. OBLIQUE TOPPLING As intersections approach vertical, toppling to the sides outside the lateral limits, becomes more likely. |
|
|