Register
Source file: register-dropdown.htm
The Register drop-down hosts tools for
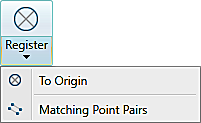
Expand below for details on each registration tool.
Run the To origin tool to undo any translation, rotation or registering that has been performed on the selected scan or scans. This sets the scan origin to (0, 0, 0) and oriented to the Y axis.
-
To set scans back to their origins, select them then, on the Position and Filter tab, go to the Register group. From the Register drop-down list select
 To Origin.
To Origin.
The Matching Point Pairs tool enables you to position data with reference to reflectors, targets,
or common features. Multiple fixed points are used to tie the data to
be registered to the reference data. This tool can be used in conjunction with the ![]() Locate Reflectors tool. See Locating Reflectors.
Locate Reflectors tool. See Locating Reflectors.
-
On the Position and Filter tab, go to the Register group. From the Register drop-down list, select
 Matching Point Pairs.
Matching Point Pairs.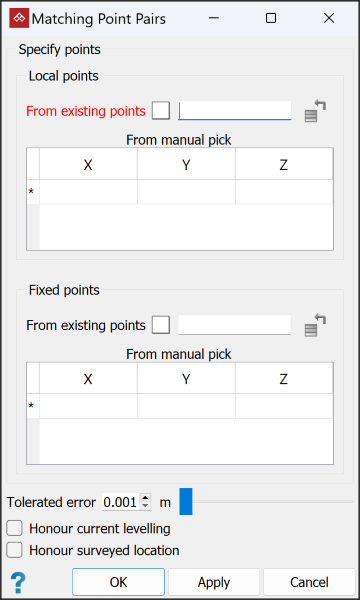
-
Specify the points to be matched in registering the scans. You can do this either from existing pointsets or by manually picking points. Expand below for each method.
 From existing points
From existing points
-
Drag the container holding the located reflectors (or equivalent) into the Local points field.
-
Drag the container with the reference points into the Fixed points field.
From manual pick
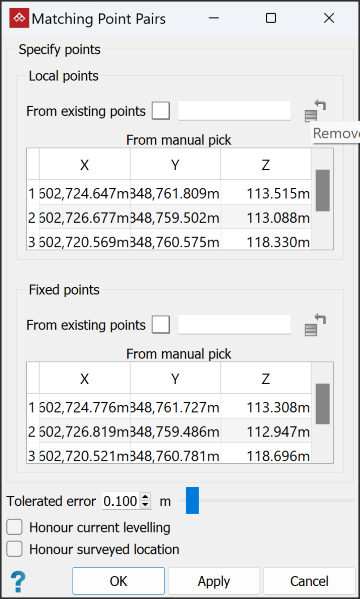
Either enter values into the cells for X,Y,Z coordinates of local and fixed points, or select the first available row of the relevant field, then click on the point locations in the view window.
Note: From manual pick allows the local and fixed points to be loaded in separate views. However, all local points must be in one view, and all fixed points must also be in one view.
Note-
Local points are points to be moved to align with the Fixed points. They can be defined using the
 Survey Points
or
Survey Points
or  Locate reflectors tool. See Survey Points or Locating Reflectors.
Locate reflectors tool. See Survey Points or Locating Reflectors.
-
Fixed points are the known reference points that have been created on the base data, which can also be a survey station database of reflectors.
-
You need at least three points in each of the local and fixed point sets
-
At least 50% of local points must have corresponding points in the fixed set, though point sets do not require an identical number of points within them.
-
-
Set the remaining options, as follows:
-
Tolerated error value as the final tolerated distance error of acceptable pair matches.
-
If the data is level, select Honour current levelling to allow translation of the data in any direction, but to restrict rotation to about the Z-axis only.
-
If the data requires rotation, but not translation, select Honour surveyed location.
-
-
Highlight the scans to be registered in the project explorer.
-
Click OK or Apply.
The data will move to its correct location.
