Matrix
Transform an Object by a Matrix
Use the Matrix option to use a matrix to transform an object. If you know the matrix you want to use, then you can specify it as part of this option. You can, however, use the Calculate option to create a matrix (either 2D or 3D) from a set of original and transformed points.
This option can also be accessed by selecting the ![]() Move by Matrix button from the Move toolbar. The Move toolbar is a "sub toolbar" and can either be accessed through the Modify toolbar or through using the Toolbar Visibility option (under the Tools menu).
Move by Matrix button from the Move toolbar. The Move toolbar is a "sub toolbar" and can either be accessed through the Modify toolbar or through using the Toolbar Visibility option (under the Tools menu).
Instructions
On the Design menu, point to Transformation, then click Matrix.
Transformation by matrix panel
where A is defined transformation
Select this option to use an existing transformation. The drop-down list contains all transformation parameters found in your Transformation Matrices file (<proj>.env_tran). The Transformation Matrices file should be located in your current working directory.
where A = I
Select this option to enter each element of the matrix. Keep in mind that transformation matrices entered through this panel are saved into the Transformation Matrices file. Refer to Appendix A for information on how to manually add matrices to this file
Create copy
Select this check box if you want the transformation to be applied to a copy of the object.
Select OK.
The Multiple Selection box is then displayed. Use the Multiple Selection box to choose your method of selecting the objects and select the objects.
If you are selecting by object, then the object will be transformed immediately. If you are selecting a category other than object, then the object that will be transformed is the first digitised object in the selected category and you will be asked whether or not you want to keep the change. If you do, then all other objects in the selected category will also be transformed.
Subsequent selections will have the same transformation applied unless you exit the option and re-select.
Advanced Information
Vulcan uses homogeneous coordinates to simplify the linear algebra required to carry out transformations (both forwards and backwards). These coordinates also make it possible to define to define perspective transformations.
Instead of representing a point in space as an X, Y and Z coordinate, that is (X, Y, Z), points are represented by an infinite number of four dimensional vectors, (W*x, W*y, W*z, W).
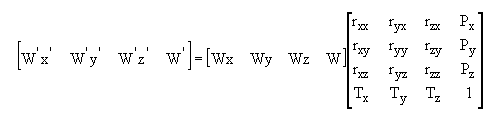
Figure 1 : The General Form of a Transformation Matrix
Perspective
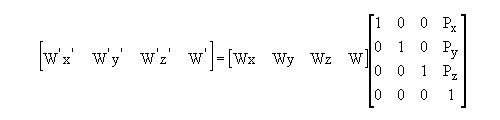
Figure 2 : The Matrix Transformation for Perspective Distortion
Where
Px is the inverse of the X coordinate from where the image was viewed
Py is the inverse of the Y coordinate from where the image was viewed
Pz is the inverse of the Z coordinate from where the image was viewed
Additional Information on Matrix Transformations
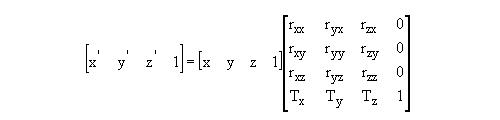
Figure 3 : Standard Form for a Transformation Matrix
If you want to perform a number of transformations, i.e. a rescale and a translation, then multiply the appropriate matrices together. For example, to rescale and then translate multiply the scaling and the translation matrices.
Translations
A translation is when an object is moved a given distance and direction. For example, transforming the point (1, 1, 1) to (2, 0, 4) and the point (2, 0, -2) to (3, -1, 1) is a translation.
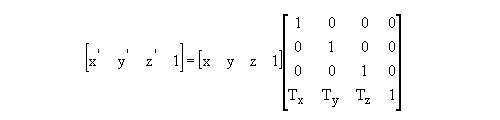
Figure 4 : The Matrix for Translations
Where
Tx is the X shift
Ty is the Y shift
Tz is the Z shift
In the above example, Tx = 1, Ty = -1, and Tz = 3.
Rescaling
Scaling is when an object is dilated or contracted.
Example: Transforming the point (1, 1, 1) to (0.5, -1, 2) and the point (2, 0, -2) to (1, 0, -4) is a rescale.
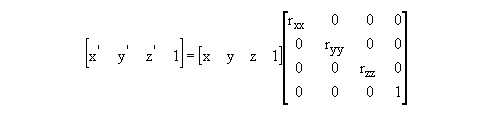
Figure 5 : The Matrix Transformation for Scaling along the Major Axes
Where
rxx is the X scale factor
ryy is the Y scale factor
rzz is the Z scale factor
In the above example, rxx = 0.5, ryy = -1 and; rzz = 2.
Rotation
Rotation in three dimensions requires the angle of rotation and an axis of rotation. The canonical rotations are defined when one of the positive X, Y or Z coordinate axes is chosen as the axis of rotation.
Note: The direction of a positive angle of rotation is chosen to conform to the 'right-hand' rule with respect to the axis of rotation.
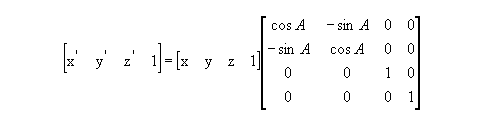
Figure 6 : Rotation about the Z-axis
Where
A is the angle of rotation about the Z-axis.
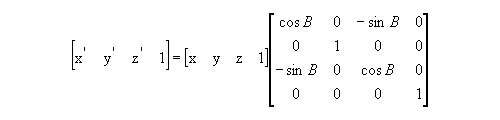
Figure 7 : Rotation about the Y-axis
Where
B is the angle of rotation about the Y-axis.
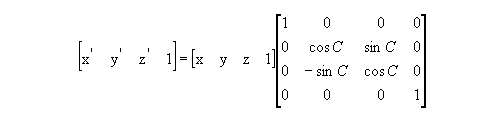
Figure 8 : Rotation about the X-axis
The general case of rotation about an Y-axis can be built up from these canonical rotations by using matrix multiplication.
For more information on the nature of matrix transformation, refer to computer graphics books such as:
Schaum's Outline of Theory and Problems of Computer Graphics
Roy A Plastock and Gordon Kalley
McGraw-Hill
ISBN 0 070 50326 5

